高德地图驾车巡航:AI原生时代的智慧驾驶中枢
导读
在移动出行领域,高德地图已全面升级为基于空间智能的AI原生应用,致力于为用户提供超越统导航的体验。其中,“驾车巡航”作为核心模块,不仅是一款智能驾驶辅助工具,更代表了未来AI化导航的服务范式。它打破了传统导航“目的地驱动”的局限,通过智能唤醒、自动识别行驶路线,并结合实时精准的语音播报、路况预警与限速提示,全方位守护驾驶安全。驾车巡航通过最大程度地减少驾驶员与设备的互动,显著提升了驾驶的安全性和便利性,是高德地图从“工具”向“智慧出行伙伴”演进的关键一步。驾车巡航|AI驱动的无感导航体验
“驾车巡航”模式是一种深度融合实时路况、AI分析和智能语音交互的驾车导航模式,旨在为用户提供更安全、便捷和高效的无感驾驶体验。该模式不再强制用户预设目的地,而是能自动识别当前行驶路线、实时预警前方拥堵和事故、提供精细的红绿灯信息,并通过智能助手功能和优化信息显示,帮助驾驶员更好地掌握路况,从而显著减轻驾驶负担。
驾车巡航与传统导航的核心区别
1.启动方式:传统导航通常需要手动输入目的地并确认,驾车巡航则能够智能唤醒并自动识别行驶路线,实现“上车即导航”的无感体验。
2.智能程度:传统导航功能相对固定,主要提供路线指引;驾车巡航则依托强大的AI技术,提供更智能、更个性化、更具前瞻性的驾驶辅助服务。
3.交互方式:传统导航多依赖触屏操作,驾车巡航则强调智能开启与语音交互,最大限度减少驾驶员手动操作,提升驾驶安全性。
产品全貌|覆盖全场景的驾驶守护
驾车巡航旨在为用户提供高度定制化和场景化的驾车导航体验,其业务设计覆盖了用户驾车出行的每一个关键阶段。
核心场景:无缝切换的驾驶流程
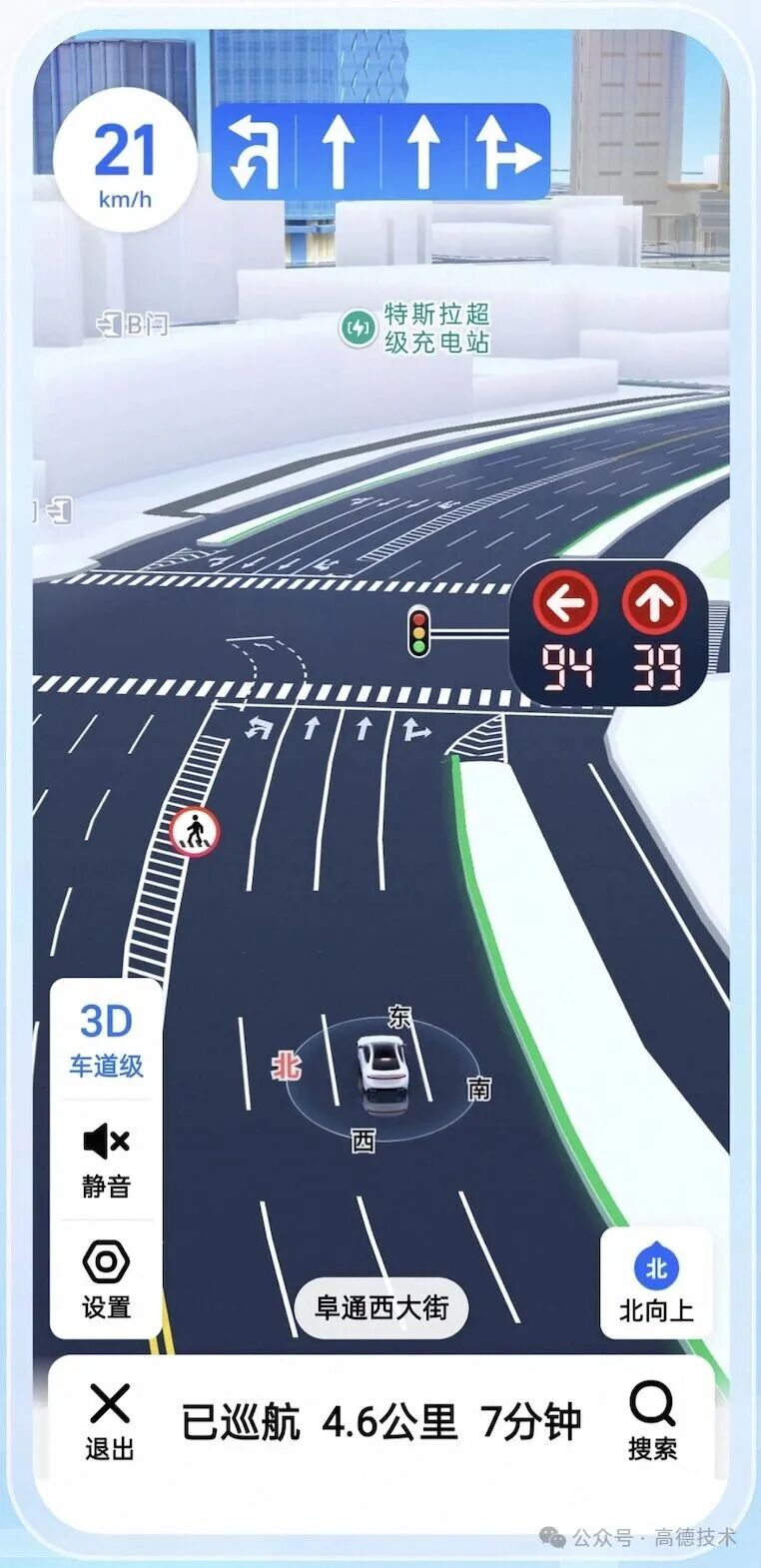
1.手机常规巡航 (Default State):这是最常见的场景,提供实时路况、路线指引、车速显示、电子眼预警等基础功能,确保用户在日常驾驶中的顺畅体验。

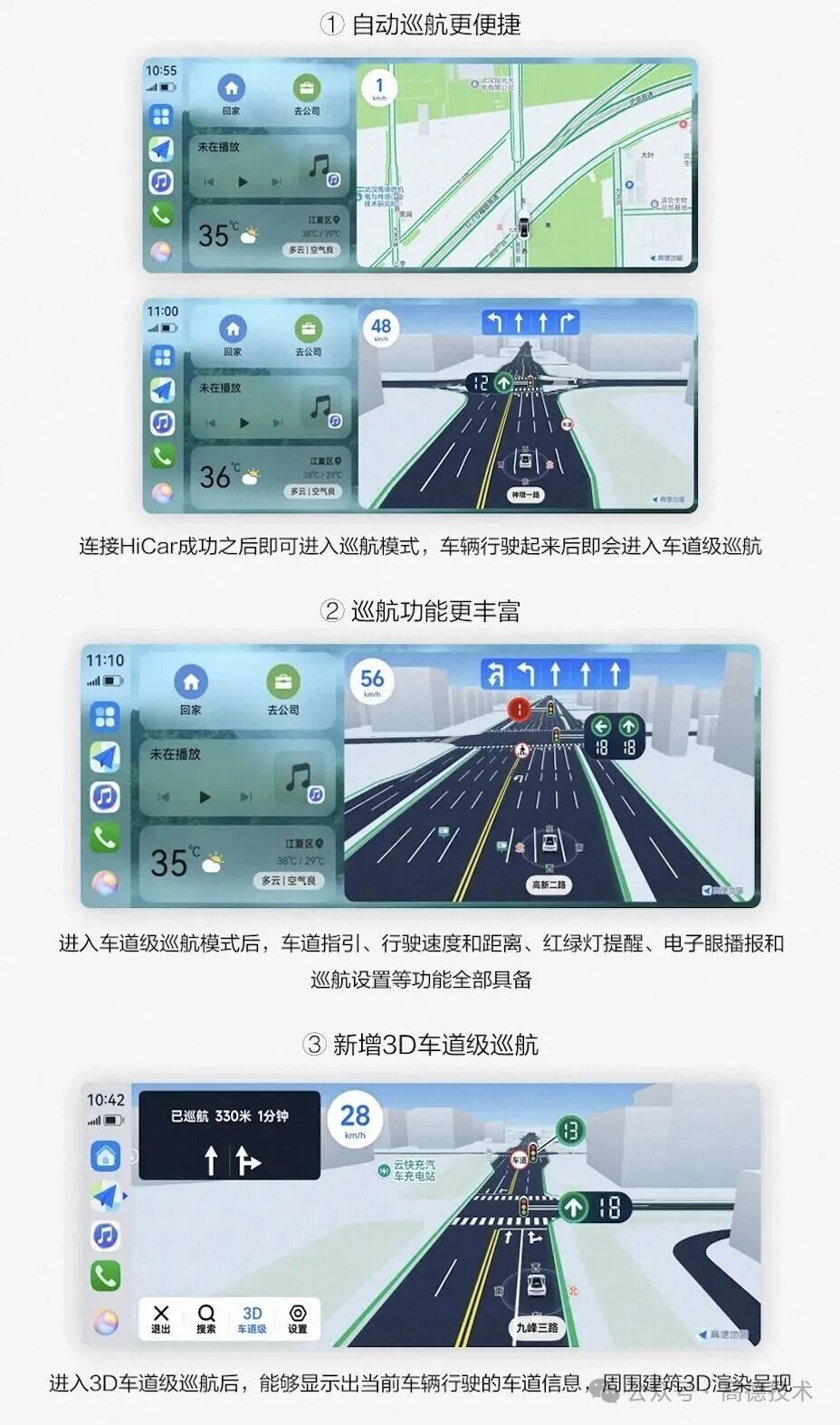
2.车载互联巡航 (Projection State):随着智能汽车的普及,驾车巡航深度适配 CarPlay、Hicar、Ucar 等车载系统。通过投屏技术,将导航信息无缝投射到车载大屏,提供更符合驾驶习惯的沉浸式体验,有效减少驾驶员低头查看手机的频率,显著提升行车安全。

核心功能组件:以驾驶安全为中心
驾车巡航集成了诸多实用组件,旨在提供全面且便捷的驾驶辅助功能:
1.智能语音播报与静音:根据路况和用户偏好,提供实时语音指引,并支持一键静音。
2.驾驶偏好设置:提供快速入口,允许用户调整地图显示模式、播报音量、昼夜模式等个性化设置。
3.车头朝向切换:支持地图视图在“车头向上”(跟随车辆方向)和“北向上”(固定指向北方)之间切换,满足不同驾驶员的地图阅读习惯。
4.实时迈速表:精准显示当前车速,帮助驾驶员掌握行驶状态。
5.车道线与道路名:清晰地展示当前车道指引和道路名称,在复杂路段尤为关键,有效避免因选择错误车道而导致的问题。
6.便捷退出:提供明确的退出按钮,允许用户在任何时候便捷地结束巡航。
7.车道级导航开关:在支持高精地图的区域,提供更精细的车道级指引开关,帮助驾驶员在多车道路口做出准确选择。
用户价值:安全、高效、省心
驾车巡航通过上述多场景支持和丰富功能组件,带来了超越期待的用户体验:
1.极致提升行车安全:减少分心驾驶,提供精准指引和风险预警。
2.显著优化驾驶效率:自动规划路线、快速找到路线和停车位,节省时间。
3.打造个性化无感体验:支持用户自定义设置,满足不同需求,实现人车交互的自然流畅。
技术探究|状态驱动的AI原生架构
驾车巡航系统的技术实现,深刻践行了“状态驱动”的核心设计理念。通过整合跨平台框架和有限状态机(FSM)模式,我们构建了一个遵循 SOLID 原则的技术架构,其特点是高内聚、低耦合、模块化设计,极大地提升了系统的可扩展性和可维护性。
驾车巡航业务,从用户视角看是一个连续且直观的体验流;但从技术视角审视,其背后是极其复杂且多变的业务场景:用户可能在手机上常规导航,随时切换到车载投屏,或在抵达目的地后进入精细化停车引导。这种多态性和事件驱动的特性,若采用传统的分支逻辑"if/else大战",将迅速陷入逻辑耦合、维护困难的泥沼。
高德地图巡航模块巧妙地引入了状态机模式,将其打造为驾车巡航的“智慧大脑”,不仅清晰地隔离了业务逻辑,更确保了系统行为的可预测性,并为未来功能的灵活扩展奠定了坚实基础。
整体技术架构概览
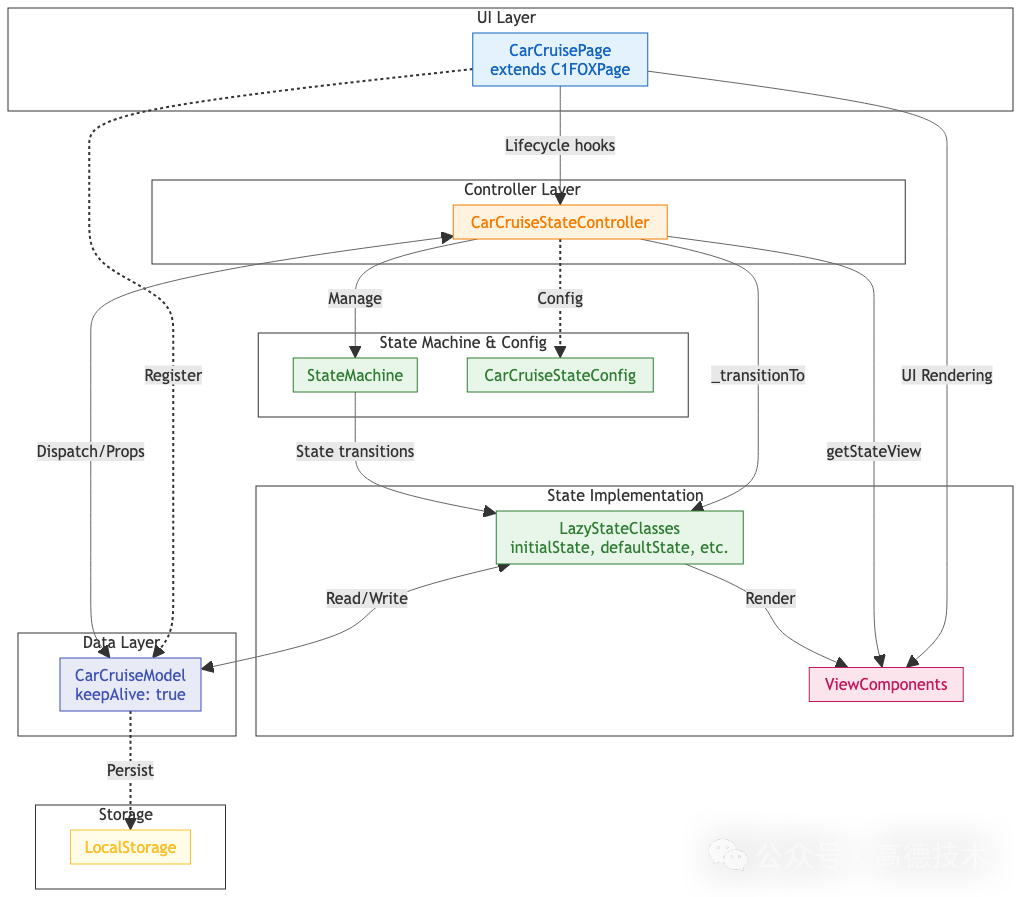
以下架构图展示了驾车巡航系统的核心组件及其协作关系,清晰地揭示了其分层设计和模块间的交互模式。
架构图说明
应用入口层 (CarCruisePage):页面主入口,负责生命周期管理、CarCruiseStateController 的实例化与控制,以及 CarCruiseModel 的注册。它接收渲染结果并最终呈现给用户。
业务编排层 (CarCruiseStateController):核心调度器,封装并驱动 StateMachine,依据 CarCruiseStateConfig 管理状态,通过 Dispatch 机制与 CarCruiseModel 交互,并提供 mapStateToProps 和 getStateView 方法供页面层调用。
状态机与配置层 (StateMachine, CarCruiseStateConfig):StateMachine 是状态机核心引擎,负责状态实例的注册与转换。CarCruiseStateConfig 定义了所有状态的蓝图和懒加载机制,是状态管理的元数据。
场景状态实现 (LazyStateClasses): CarCruiseInitialState, CarCruiseDefaultState, CarCruiseEndPoiParkState, CarCruiseProjectionState 等具体状态类。它们包含特定场景的业务逻辑,负责渲染对应的 ViewRenderComponents,并与 CarCruiseModel 进行数据交互。
数据存储与模型 (CarCruiseModel):独立的业务数据模型,通过 keepAlive 保证数据持久性,存储如 machineStateName 等核心数据,供控制器和状态实现类读写。
用户界面渲染 (ViewRenderComponents):承载具体 UI 元素的组件集合,由 LazyStateClasses 驱动渲染,并最终由 CarCruisePage 呈现。
状态机设计与业务实践:驾车巡航的业务流转精髓
状态机模式的引入,使得驾车巡航业务的动态行为管理变得清晰且富有弹性。
状态机核心:业务场景的抽象与流转
状态机将驾车过程中复杂的系统行为,抽象为有限个明确定义的“状态”。系统在任一刻只处于一个状态,并通过“事件”触发,从“当前状态”合法地切换到“新状态”,并执行相应的“动作”。在巡航业务中,这些“状态”直接映射到用户在不同场景下的驾车模式:
initialState (初始化态):页面加载的瞬时态,负责根据外部环境(如启动参数)判断并快速引导至首个业务状态。
defaultState (手机巡航态):标准的手机端驾车导航模式,处理常规路线指引、路况播报、用户触控交互等核心业务。
projectionState (车载互联巡航态):专为 CarPlay、Hicar、Ucar 等车载投屏场景设计的模式,其 UI 和交互逻辑与车机深度适配。
endPoiParkState (导航结束停车态):用户接近或抵达目的地时触发,业务焦点从驾驶转向停车引导。
核心组件协作:状态机的业务落地
状态机并非孤立存在,而是通过以下核心组件的紧密协作,将抽象理论转化为实际的业务实践:
CarCruiseStateController (业务调度中枢):它是整个状态机系统的核心协调者,充当了“业务意图与技术实现”之间的翻译官。当外部捕获到业务事件(如“检测到车载设备连接”、“用户点击退出”)时,会通知 CarCruiseStateController。控制器随即根据当前状态和事件,查询预设的转换规则,驱动状态机进行合法切换。它对外提供清晰的业务接口(如 toDefaultState()、toProjectionState()),这些方法将业务意图转化为状态转换指令,从而解耦了业务流程与具体实现。同时,它负责将当前状态机的“技术状态”映射为用户可见的“业务视图”,通过 mapStateToProps() 传递业务数据,并通过 getStateView() 动态渲染对应的 UI 组件集,确保用户体验的高度一致性。
CarCruiseStateConfig (业务场景的“蓝图”与性能策略):这份配置是状态机最直接的业务映射层。它以声明式的方式,定义了所有核心业务状态的名称,以及每个状态对应的具体实现模块(LazyStateClass)。这里的每一个 stateName 都直接代表了一个巡航业务中的关键场景模式。通过 get LazyStateClass() 实现的**懒加载(Lazy Loading)**机制,是状态机在业务实践中的一个重要性能策略。例如,只有当用户真正进入车载互联场景(即状态切换到 projectionState)时,系统才会动态加载与车载UI和通信相关的代码模块,避免了在手机巡航模式下加载冗余资源,极大地优化了应用的启动速度和内存占用。
LazyStateClass 实例 (特定业务场景的行为具象化):每一个在 CarCruiseStateConfig 中定义的业务状态,都对应着一个具体的“状态实现类”。这些类是业务行为的具象化,高度内聚地封装了该模式下的所有行为:
UI 布局与交互定制:以 CarCruiseProjectionState 为例,它会根据车载屏幕的特点,驱动渲染一套与手机端截然不同的 UI 组件集(例如,引用 CarCruiseConst.js 中为车载定制的 CAR_WIDGET_KEY_LIST 来调整按钮大小、位置、信息密度,甚至加载专属的 CruiseProjectionWidgetContainer.jsx)。这直接解决了车载大屏操作安全性和便捷性的业务挑战。
业务逻辑隔离:CarCruiseProjectionState 内部将专门处理与车载系统通信的逻辑,例如通过 natives 接口发送地图指令,或调用专门的 CruiseCarplayLogic.js 模块来处理来自车载的事件和指令。这些逻辑在“手机巡航”状态下是完全不必要的,状态机有效地隔离了这些场景特有的业务复杂度。
数据上下文管理:每个状态类会与 CarCruiseModel 交互,读写与该业务场景相关的数据,确保在特定模式下,数据都是实时且准确的。
CarCruiseModel (业务状态的持久化与共享):CarCruiseModel 作为数据层,与状态机紧密协作。其 keepAlive: true 的设计确保了在复杂的业务流程中,核心状态数据(如当前状态名称 machineStateName、用户偏好设置)不会因状态切换而丢失,保障了用户体验的连续性和一致性。它是连接不同业务状态下数据的桥梁。
状态流转:驾车场景的动态演进
通过上述组件的协同工作,状态机使得驾车巡航的业务流转变得清晰而富有弹性:
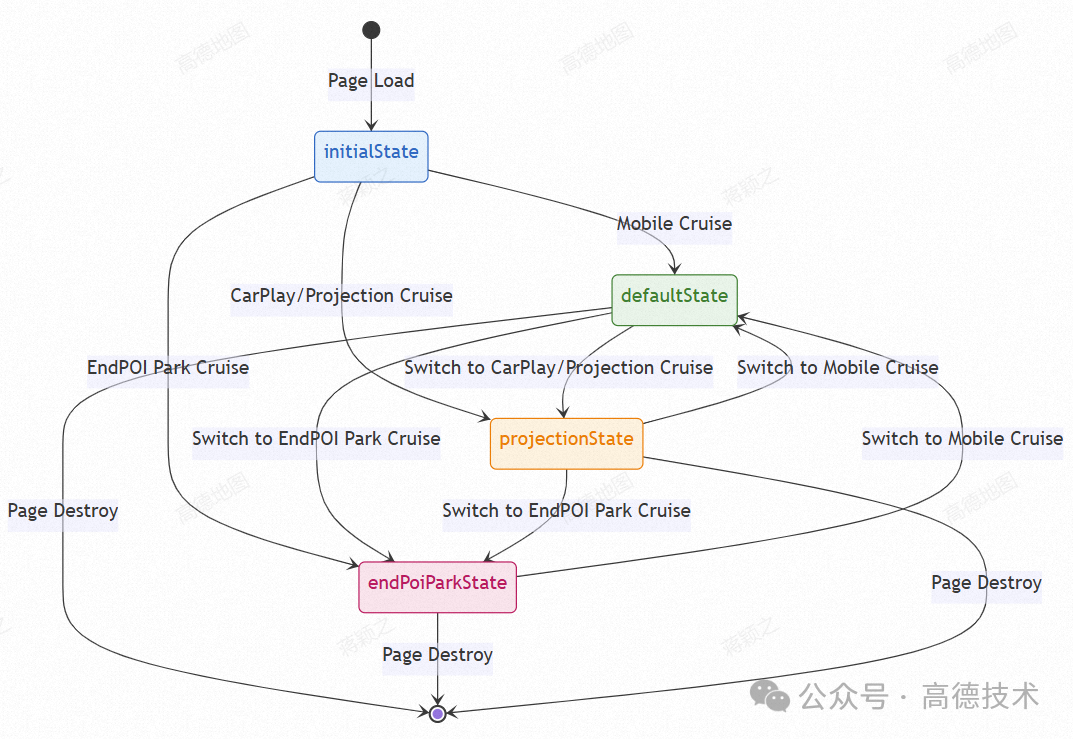
从 initialState 到首个业务场景:页面加载时,系统迅速判断当前环境(手机或车载,是否导航结束),将状态从 initialState 直接引导至 defaultState(手机巡航)、projectionState(车载互联巡航)或 endPoiParkState(导航结束停车)。
驾驶中的场景切换:
设备切换:用户将手机连接到车载系统(触发事件),状态机将从 defaultState 无缝切换到 projectionState,UI 和逻辑立即适配车载环境。
流程阶段切换:导航系统检测到用户即将到达目的地(触发事件),状态机将从 defaultState 切换到 endPoiParkState,业务焦点转向停车辅助。
状态逆转与终止:用户退出车载模式、离开停车区域,或页面销毁,均有清晰的状态回溯或终止路径,保证了业务流程的完整性。
车载互联适配:驱动的标准化与定制化权衡
车载互联适配是巡航业务中一项关键的技术挑战。其核心落地方案是基于状态机机制中的 projectionState。
1. projectionState:车载适配的逻辑枢纽
当系统识别到当前运行环境为 CarPlay、Hicar、Ucar 等车载互联平台时,CarCruiseStateController 会将页面状态流转至 projectionState。这一状态切换是车载适配所有定制化逻辑的入口。处于 projectionState 状态下,系统将启用一系列针对车载环境的定制化逻辑和视图渲染策略。
2. UI 布局与组件集的车载优化
车载环境对 UI 的可用性和安全性提出更高要求。在 projectionState 下,UI 呈现进行以下技术优化:
动态组件加载与适配:CarCruiseConst.js 中定义的 HONOR_CAR_WIDGET_KEY_LIST 等配置,为车载模式提供了定制化的组件可见性和布局指导。车载模式可能精简非核心组件,或调整关键操作的布局位置,以适应驾驶员的视野和操作习惯。通过 CruiseWidgetData.get AJX_WIDGET_CONFIG() 方法,可以根据当前场景动态返回适配车载屏幕的 Widget 配置,包括尺寸、位置、样式等。
大屏交互元素设计:交互元素尺寸放大,确保在行驶中快速、安全操作。信息密度有效控制,将驾驶员注意力聚焦于核心导航信息。
3. 车载系统通信与交互逻辑
projectionState 不仅处理 UI,更肩负着与车机底层系统进行通信的职责:
natives API 交互:通过 natives 对象,直接调用车机底层的接口,实现地图显示模式、缩放、POI 交互等与地图引擎紧密相关的控制。
车载专属逻辑封装:如 logic/CruiseCarplayLogic.js 模块,封装了与特定车载协议的通信逻辑,处理音频路由、方向盘按键事件、语音助手指令传递等车载专属功能。
状态与事件同步:将导航的核心状态和关键事件同步至车载系统,为车机提供决策依据和信息显示。
4. 个性化与自动化体验
CruiseWidgetData.js 中包含的 autoEnterCruiseAfterProjectionSwitch 等配置项,是车载互联体验自动化的体现。通过本地存储或云端配置,系统允许用户自定义在投屏后是否自动进入巡航模式。这种设计减少了手动操作步骤,提升了驾驶的便捷性和流畅性。
5. 设计哲学:解耦与可扩展性
车载互联适配的设计哲学在于,将核心导航逻辑与场景特有适配逻辑进行有效解耦。projectionState 提供了一个干净的边界,使得车载定制化可以在不影响通用巡航逻辑的前提下独立开发和迭代。通过这种方式,高德地图能够在满足各种车载互联标准的同时,提供差异化且高度优化的用户体验,实现技术架构的灵活性和业务需求的快速响应。数据驱动智能:精准动态提示和引导
红绿灯、电子眼并非仅基于前行驶路线进行探测,而是将范围扩展到多条相关道路上,并展示多个红绿灯、电子眼信息,给用户提供更多前置的动态数据,帮助用户进行驾驶预判,提高出行和决策效率。
基于当前行驶轨迹推导、定时更新动态信息是提供精准提示和引导的一个核心技术。在巡航的技术架构中,交通服务根据用户的实时定位、当前路线进行道路的抓取,再根据用户的驾驶行为数据预判用户可能的驾驶意图。以上两类数据又作为进一步推导的“数据源”,获取在一定范围道路上的红绿灯数据、电子眼数据,并推送到客户端进行展示.稳定性保障
驾车巡航系统的稳定性是保障用户体验的基石,通过以下策略得以实现:
1.懒加载(Lazy Loading):状态类文件采用懒加载机制,显著减少了初始加载时间,同时也是系统性能优化的重要手段。
2.埋点与监控:通过业务埋点,配合性能APM(Application Performance Management)模块进行深度性能监控,为产品的持续优化和潜在问题排查提供了全面的数据支撑。
3.巡航保活:在页面生命周期中对巡航状态进行精细管理,确保 GPS 持续活跃和导航状态的连续性,从而保障巡航的准确性和稳定性。技术思考|从AI原生到未来驾驶体验
高德地图驾车巡航功能的技术方案,凝聚了高德技术团队对用户体验、性能优化和可扩展性的深入思考。通过状态机驱动设计,实现了高度模块化和可扩展的架构。懒加载、生命周期管理和数据持久化等策略,不仅优化了性能,更确保了用户体验的一致性。
然而,技术演进的道路永远充满挑战。每一个技术设计决策背后,都是对实际问题的权衡和思考。我们坚信,在软件工程的道路上,没有完美的解决方案,只有不断进化的最佳实践。通过持续的数据分析、用户反馈和前沿技术创新,我们致力于在技术创新和用户体验之间找到完美的平衡点,为用户提供更智能、更贴心的驾车巡航体验。未来已来|迈向更智能的AI驾驶辅助
高德地图驾车巡航模块,通过精巧的状态机设计、高度模块化的组件思想和对多场景的深度适配,为用户提供了卓越的AI原生驾车导航体验。其技术方案在保证功能丰富性的同时,也兼顾了性能优化和系统稳定性。
未来驾车巡航将深度结合大数据和AI技术,实现更精准的用户驾驶意图识别、更智能的状态切换和信息预警。通过持续的技术创新,驾车巡航将进一步与各类车载系统进行深度集成,深度融合车载生态,提供更原生、更流畅、更具沉浸感的互联体验。驾车巡航【车道级导航】与【红绿灯识别】
在驾车巡航的场景切换之外,状态机同样驱动着地图引擎。在此,我们为各位技术同仁揭示两项至关重要的核心技术,它们是未来驾车体验革新的关键基石,也是高德地图AI原生应用深度的具体体现:
地图车道级导航 (Lane-level Navigation):驾车巡航系统已实现高精度的车道级导航功能。它通过深度融合高精地图数据与用户偏好配置,结合底层 natives 接口与地图引擎的实时通信,能够在复杂多车道、多路口场景下,在地图上实时精准渲染出驾驶员应行驶的具体车道,并辅以直观的前端可视化提示。这项技术显著降低了驾驶员在复杂路口的选择难度和变道风险。
地图红绿灯识别与渲染 (Traffic Light Recognition/Rendering):为进一步提升路口通行效率与驾驶安全性,驾车巡航系统集成了红绿灯状态实时识别与地图精准渲染能力。通过多源数据融合(高精地图、实时路况服务,并预留车载视觉识别集成接口),系统能够在驾驶员接近路口时,在地图上精确呈现红绿灯图标及其当前状态(红、黄、绿)。这使得驾驶员能够提前预判并从容应对路口状况。
这两项微观智能特性,是驾车巡航在实现宏观业务流程控制的同时,深入到微观地图渲染细节的有力证明。它们如何在状态机框架下,实现从数据采集、引擎交互到前端渲染的端到端技术链路,以及背后的性能优化与工程挑战,都将在后续系列分享中深入探讨,敬请期待!
更多关于高德地图、高德团购、高德旺铺相关资讯请持续关注!