高德车道级地图:从感知智能到空间智能的技术跃迁
车道级地图:解锁精准导航与智能驾驶新场景
高德地图作为一款国民级的APP,为用户提供一体化的出行、生活体验,是我们最大的愿景。在瞬息万变的交通环境中,“该走哪条车道”曾是驾驶者的普遍焦虑。高德地图以车道级导航技术破局,不仅让手机和车机导航体验迈入亚米级精度时代,更成为高级辅助驾驶和自动驾驶落地的关键数字基座。
手机/车机导航革命: 告别“大概方向”,实现车道级精准引导。在复杂路口、高速匝道、潮汐车道等场景,用户能清晰知晓“当前在哪条车道”、“下一步该进入哪条车道”,大幅降低决策压力,提升通行效率与安全性。
高级辅助驾驶的“慧眼”: 为L2+级ADAS功能(如车道级巡航、自动变道、高速NOA)提供高精度、高鲜度的道路结构先验信息,是车辆精准定位、环境理解与路径规划的核心输入,提升系统可靠性与舒适性。
自动驾驶的基石: 面向更高级别的自动驾驶,车道级地图是不可或缺的“记忆”与“知识库”,提供超视距的道路拓扑、交通规则、动态信息预测等,是车辆安全、高效、合规行驶的底层保障。

高德车道级地图发展史:技术驱动的地图进化史诗
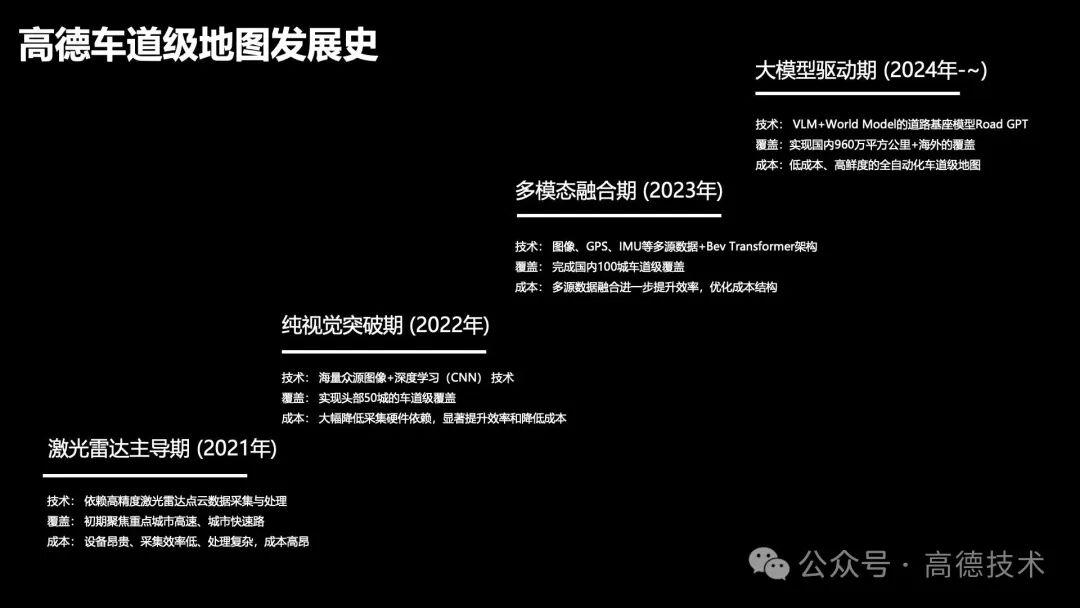
高德车道级地图的发展,是一部技术创新驱动规模应用与成本优化的史诗:
一
激光雷达主导期(2021年)
二
三
四
技术:以RoadGPT为代表多模态大模型时代,实现端到端、更智能、更高效的地图构建与更新
覆盖:实现国内960万平方公里+海外的覆盖
成本:低成本、高鲜度的全自动化车道级地图
RoadGPT:车道级地图迈入端到端多模态大模型时代
RoadGPT是高德自主研发的多模态端到端地图生成基座模型,标志着高德车道级地图技术进入智能化新纪元。
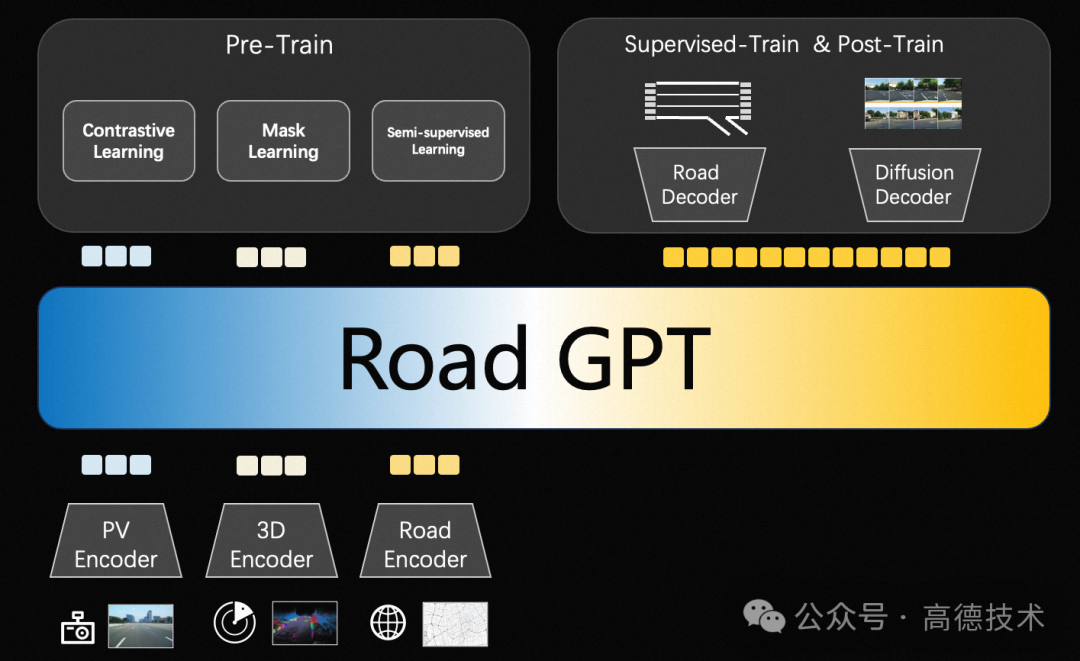
核心思想
多模态统一编码器:将图像、点云、轨迹、文本等多源异构数据映射到统一语义空间。
多任务预训练 (Pre-Train):
监督训练(Supervised-Train):
理解任务:道路拓扑生成、车道线检测、交通要素识别与SD关联等基础地图构建任务。
生成任务:通过对比学习、跨模态重建等目标(如通过车道线重建图像等),实现不同模态信息在语义层面的更好对齐。
其它辅助任务:图像描述生成、轨迹预测、模态对比学习等,促进模型对场景的深度理解。
监督训练(Supervised-Train):
对齐任务:利用道路专家标注数据进行监督微调,促使模型输出对齐专家道路工艺。
后训练精调 (Post-Train):
强化学习 (GRPO):通过引入地图的格式奖励和美观性奖励,减少地图的逻辑性错误,并提升地图的美观性。
持续学习:模型具备在线学习能力,能快速吸收新数据,适应道路变化,实现地图的高频更新。
行业技术领导者:持续技术创新引领学界技术发展
高德在车道级地图及相关AI领域持续投入,产出了多项具有国际影响力的研究成果,以近1年为例:
【CVPR'25 HighLight】Driving by the Rules: A Benchmark for Integrating Traffic Sign Regulations intoVectorized HD Map
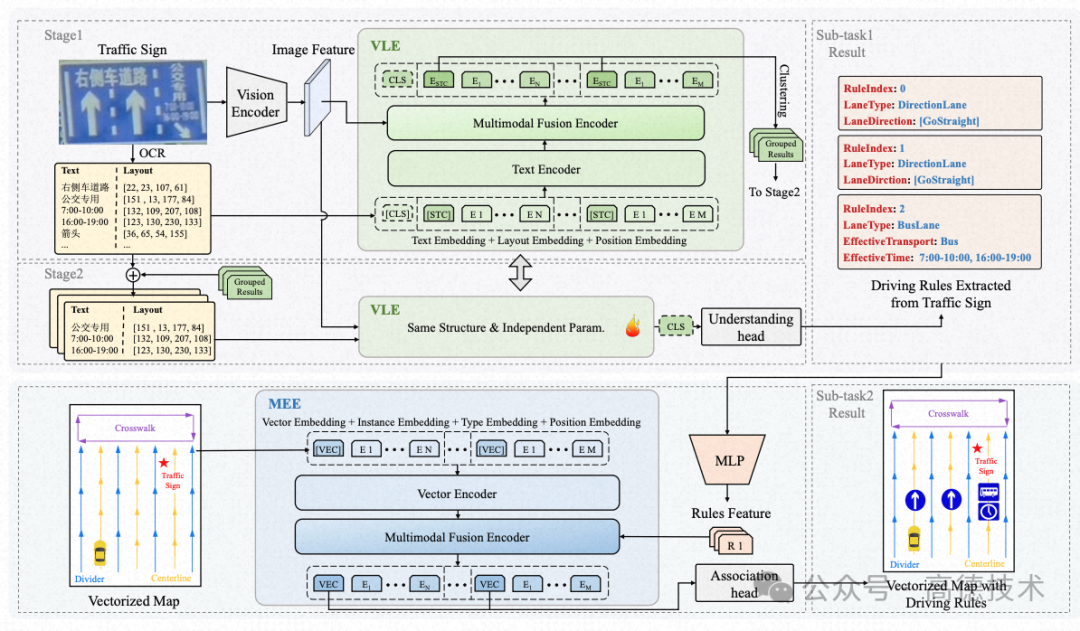
为解决当前在线建图方法忽视交通规则、限制自动驾驶系统完全“在线化”的难题,我们认为从交通标牌中完整理解规则需同时完成“规则提取”与“规则-车道关联”两个核心任务。为此,我们开创性地构建了首个大规模基准数据集MapDR(包含超1万真实场景及18,000条结构化规则),定义了将交通规则融入在线地图的新任务及评测指标,并提供了模块化方法VLE-MEE与端到端方法RuleVLM作为强大基线,旨在填补该领域的关键研究空白。
【ICCV'25】SeqGrowGraph: Learning Lane Topology as a Chain of Graph Expansions
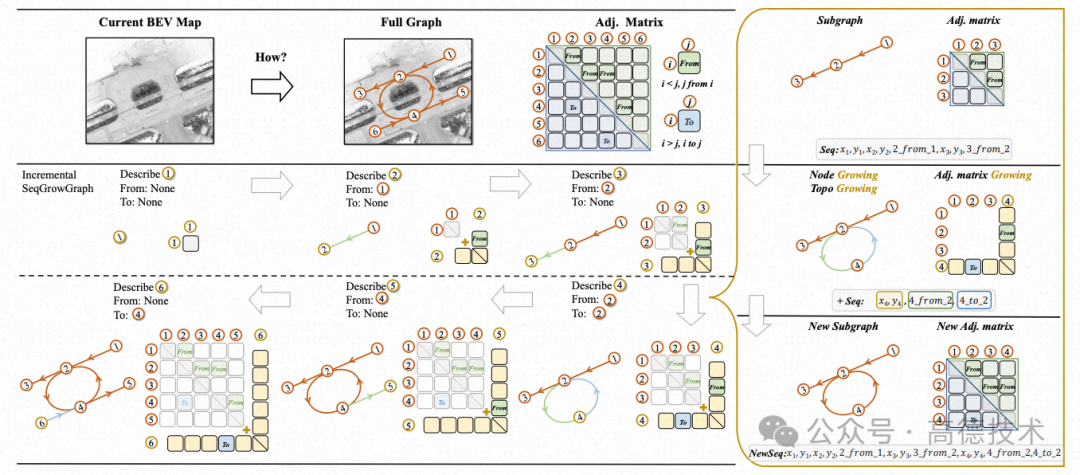
针对现有方法难以处理环路等复杂车道拓扑的问题,我们提出了SeqGrowGraph框架,它模仿人类绘制地图的方式,将车道图的构建过程建模为一个逐步扩展的序列。该方法通过自回归地预测邻接矩阵和几何矩阵的逐步扩展,在每一步中引入新节点及其连接关系,从而能够灵活地表示包括环路和双向车道在内的复杂道路结构。
【NeurIPS'25 SpotLight】FutureSightDrive: Thinking Visually with Spatio-Temporal CoT for Autonomous Driving
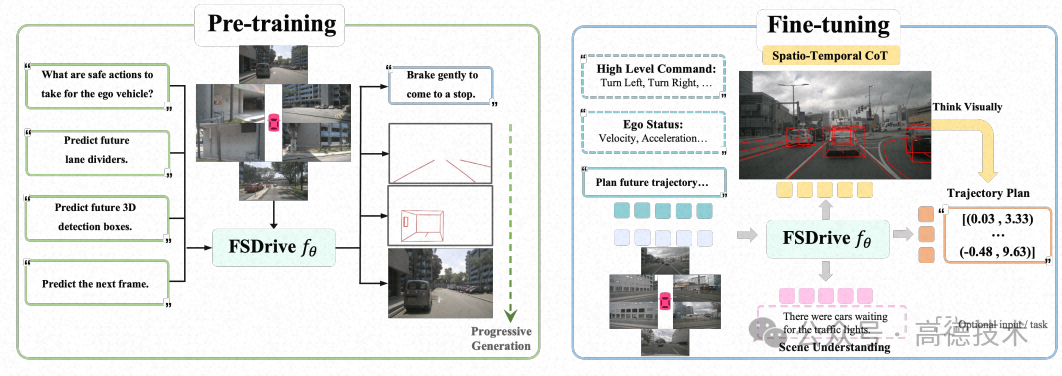
针对现有自动驾驶模型依赖文本推理(CoT)导致的细粒度时空信息损失问题,我们提出了一个名为FutureSightDrive的框架,让模型通过一种新颖的时空思维链(Spatio-Temporal CoT)进行“视觉化思考”。该方法让视觉语言模型(VLM)首先像世界模型一样,生成一幅包含预测车道线和3D物体的统一未来图像作为视觉化的中间推理步骤,接着基于当前观测和这一未来预测来规划行车轨迹。推动了自动驾驶向更接近人类思维的端到端视觉推理方向发展。
【AAAI26-Under Review】Persistent Autoregressive Mapping with Traffic Rules for Autonomous Driving
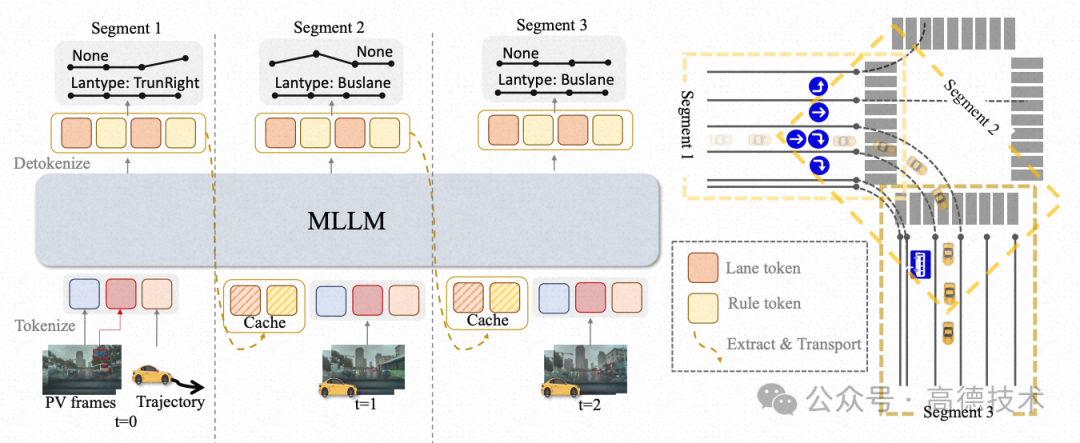
为解决自动驾驶系统在交通标志消失后“阅后即忘”的安全隐患,我们提出了一个名为PAMR 的全新框架。该方法通过地图-规则协同自回归构建(Map-Rule Co-Construction)与地图-规则缓存(Map-Rule Cache)两大核心机制,赋予了自动驾驶系统持久遵守交通规则的“记忆”能力。PAMR能够将车道线几何构建与交通规则理解融为一体,并利用缓存机制将规则信息在连续的驾驶路段中无缝传递,确保车辆即使在驶离标志后也能持续“按规矩行驶”,从而显著提升了自动驾驶决策的安全性与可靠性。
未来已来:构建动态、智能、无处不在的空间智能底座
产品角度
全球化实时“活”地图: 实现中国全境及海外核心区域车道级地图的“全覆盖、高鲜度、低成本”维护,支持分钟级甚至秒级更新。
动态地图服务: 深度融合实时交通事件、天气影响、道路施工、甚至预测性信息(如拥堵传播),为手机/车机导航以及辅助驾驶提供“先知”级服务。
车路云协同中枢: 作为连接车端感知与云端智能的核心纽带,赋能更高级别的协同感知、决策与控制,提升整体交通系统安全与效率。
技术角度
RoadGPT持续进化: 向更大规模参数、更强多模态理解与生成能力、更高效训练推理方向发展,探索地图生成与理解、规划、仿真的一体化。
世界模型与仿真: 利用生成+重建等技术(Diffusion、3DGS等),构建可编辑、可查询、可推理的物理世界模拟器,用于自动驾驶/具身智能的普及和落地。
结语
从依赖激光雷达到引领多模态大模型驱动的端到端生成,高德车道级地图的发展史,是一部用技术创新不断突破成本与规模边界、追求极致精度与鲜度的奋斗史。RoadGPT的诞生,不仅标志着高德在地图生产技术上的又一次飞跃,更预示着未来动态、智能、无处不在的空间数字底座正在成型。高德将持续深耕技术,致力于让精准、鲜活的“道路全知视角”惠及每一辆车、每一次出行,为人类迈向更安全、更高效、更愉悦的智能交通未来铺就坚实的数字之路。
更多关于高德技术、高德旺铺、高德团购相关资讯请持续关注!